MCLabで現在実施している研究を公開できる範囲で紹介しています。
本研究室は、モータドライブ系、モーションコントロール系、産業用ロボット系の3つの研究グループがあり、
それぞれの略称を MD、MC、RB と表記しています。
On this webpage, we present the research topics that are currently being carried out in MCLab.
インバータで発生するスイッチング損失を低減しつつ、電流のひずみ率(THD)もなるべく低減させる変調手法を開発する研究です。 スイッチング平均周波数とTHDのトレードオフ問題を攻めます。 従来の考え方に囚われない電圧積分に基づいて逐次制御するVIRTM(Voltage Integral Reference Tracking Modulation)と呼ばれる新しい変調器の構成について研究しています。 また、誘導機を駆動した際の騒音モデルの構成や騒音の低減が可能な変調器の開発を行っています。
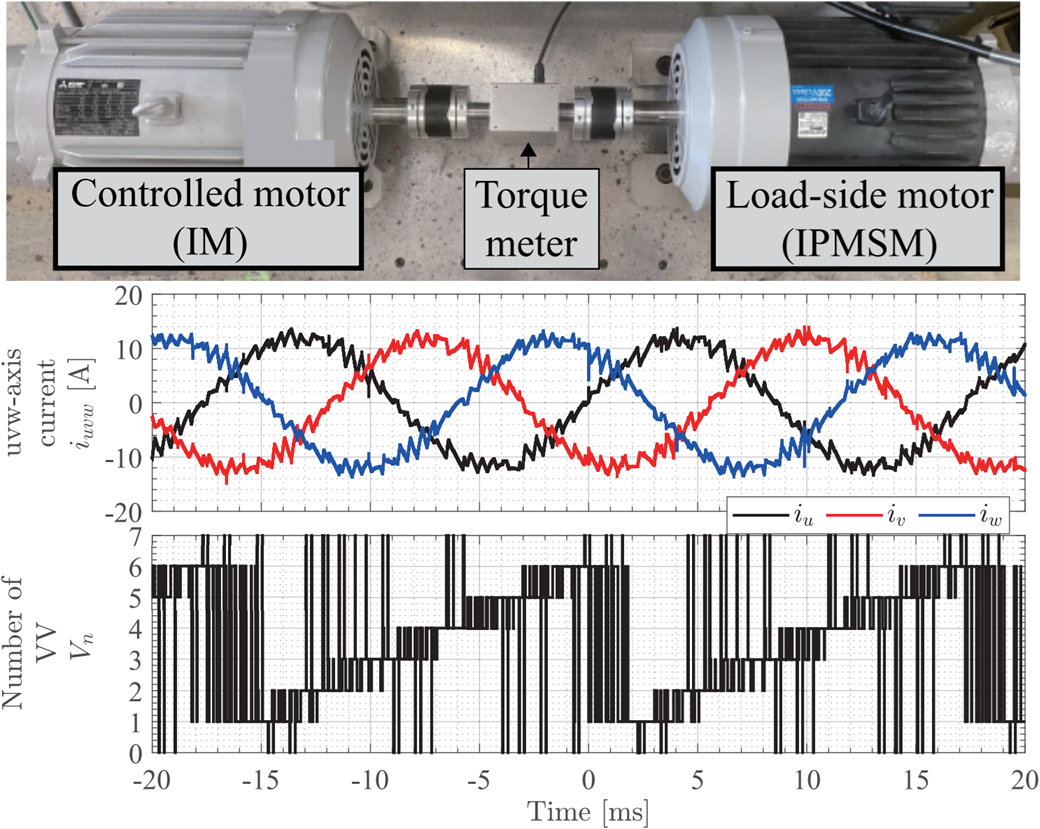
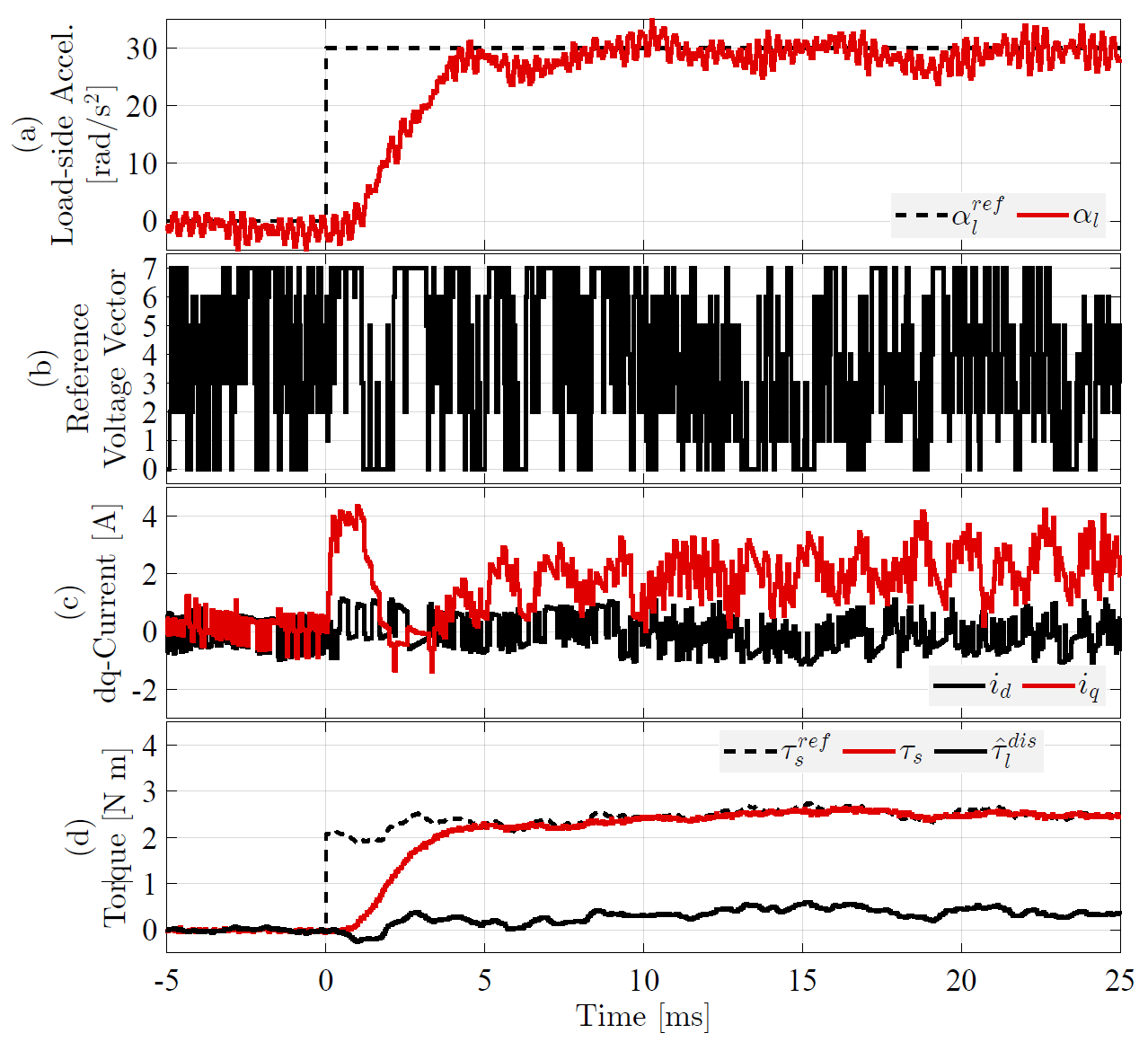
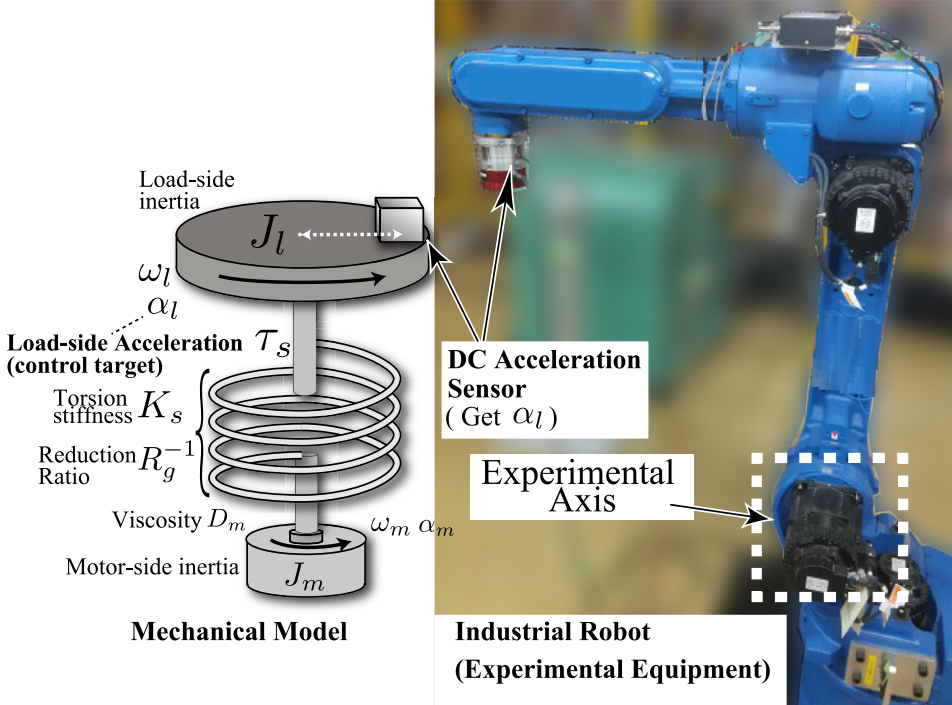
PWMを使わずにインバータの電圧ベクトルを直接操作することによって、 2慣性共振系の負荷側加速度(ロボット先端加速度)を超高速でロバストに制御する手法の研究です。 インバータが出しうる最大の電圧で駆動するので、よくある一般的なハードウェア上において、原理的に人類最速の加速度制御系が組めます。 左図は5ms以内に加速度の整定が可能であることを示した実験結果です。
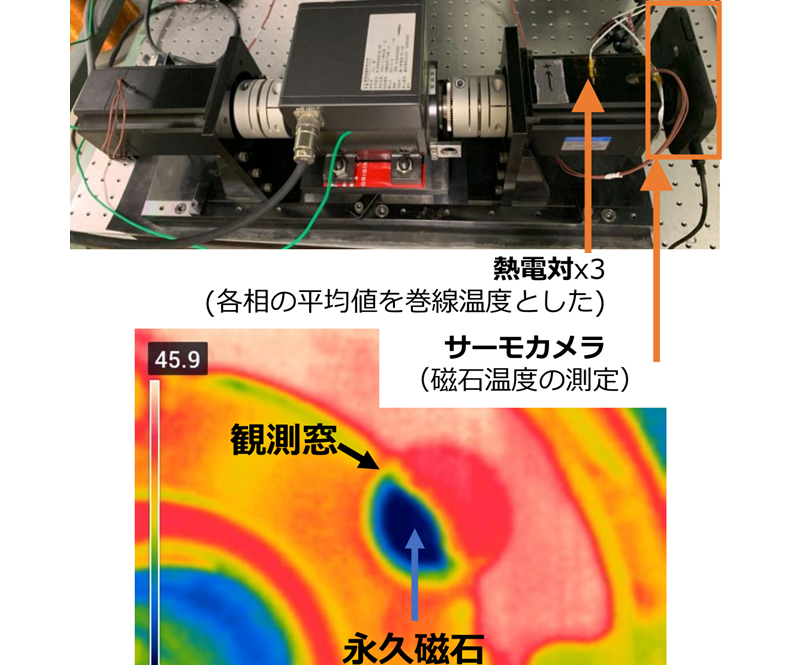
流行りの協働ロボットに必須なバックドライバビリティ(逆駆動性)を向上させるための要素技術研究です。 現状のPMSMの電流リミッタは、温度は監視せずに定格電流の200~300%で設定され、瞬間最大電流が予め決められています。 一方で、磁石温度がまだ低ければ電流を流せるはずで、温度を監視しながら流せばもっとトルクが出せます。 つまり減速比を下げることに直結し、最終的に逆駆動性が向上します。
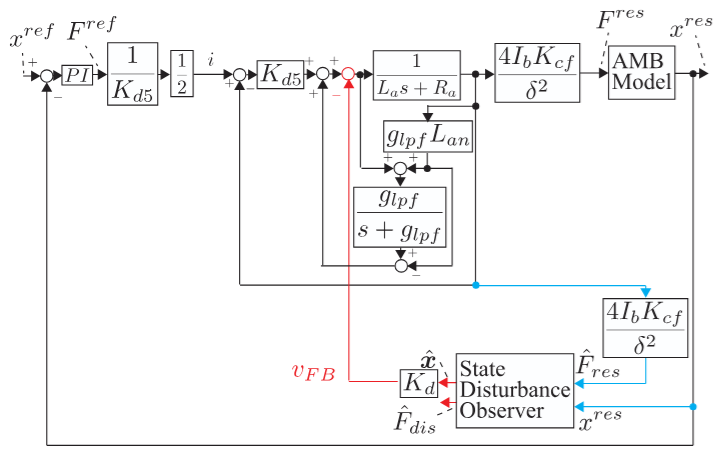
この研究では、磁気浮上系のための高い共振周波数を持つ振動抑制法を開発しています。 状態外乱オブザーバによりプラントの状態変数と外乱を分けて推定し、推定した状態変数をもとに状態フィードバックを掛けて所望の極配置を持つプラントに置き換えることで、振動を低減させます。 ただし、高い共振周波数に対応するために電流指令ではなくインバータ電圧指令に直接状態フィードバック量を注入します。
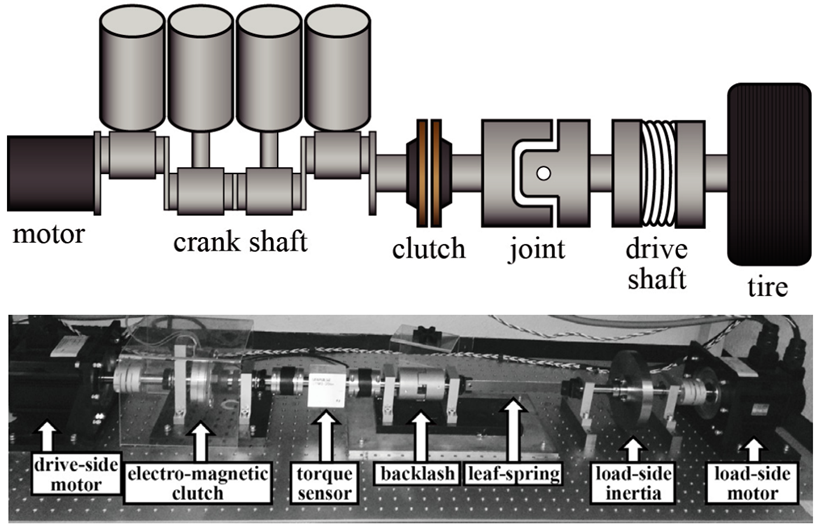
燃費を稼ぎ尚かつ乗り心地を向上させ、さらに雪道でも滑らないハイブリッド自動車用制御系の研究です。
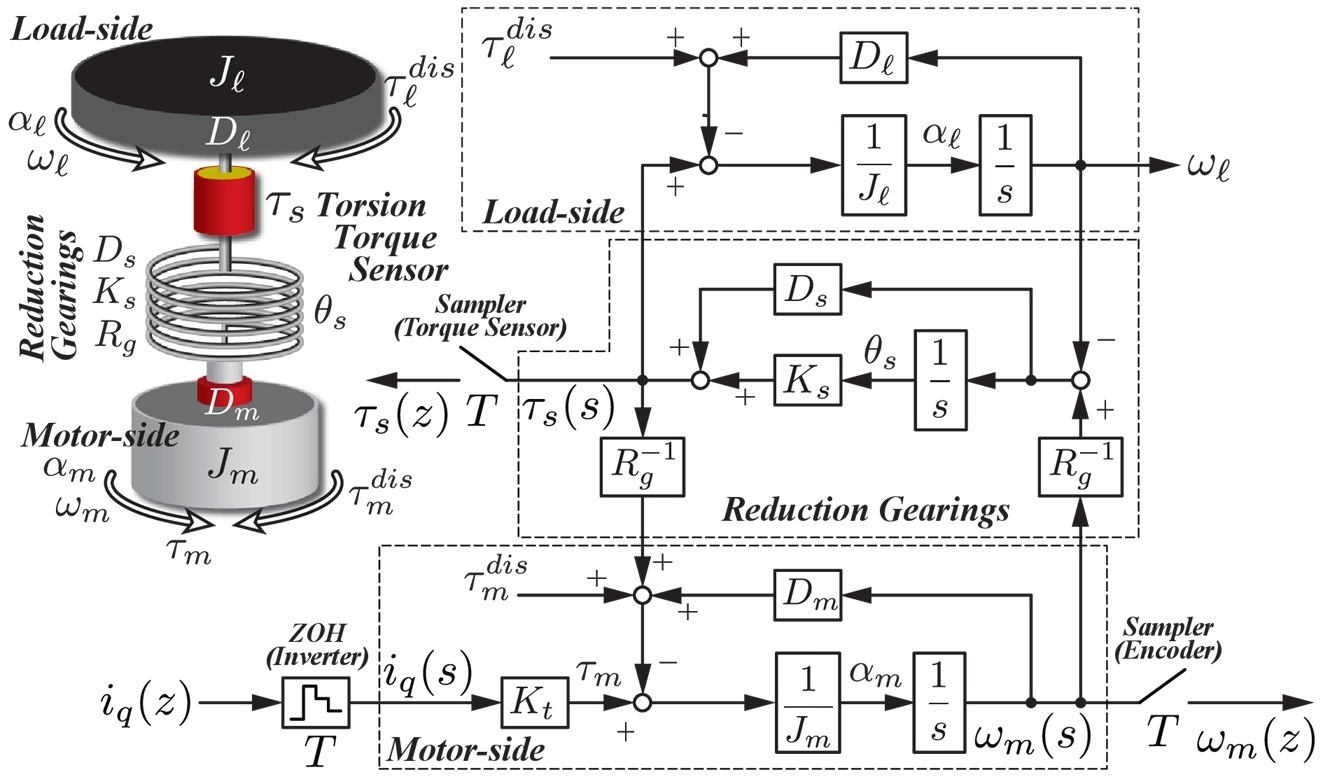
流行りの協働ロボットに必須なバックドライバビリティ(逆駆動性)を向上させるための要素技術研究です。 モータと減速機の間に搭載したねじれトルクセンサ(左図の赤い部分)によって、共振振動を抑制しつつ、 場合によってはゼロ速度領域付近の非線形摩擦やバックラッシュ、減速機の角度伝達誤差なども考慮し、 高いバックドライバビリティの実現を目指します。 高速電流制御系や新しいタイプのねじれトルクセンサの開発もしています。 また近年ではエンコーダとトルクセンサを持つ2慣性系のための離散化手法の理論的な研究も行っています。
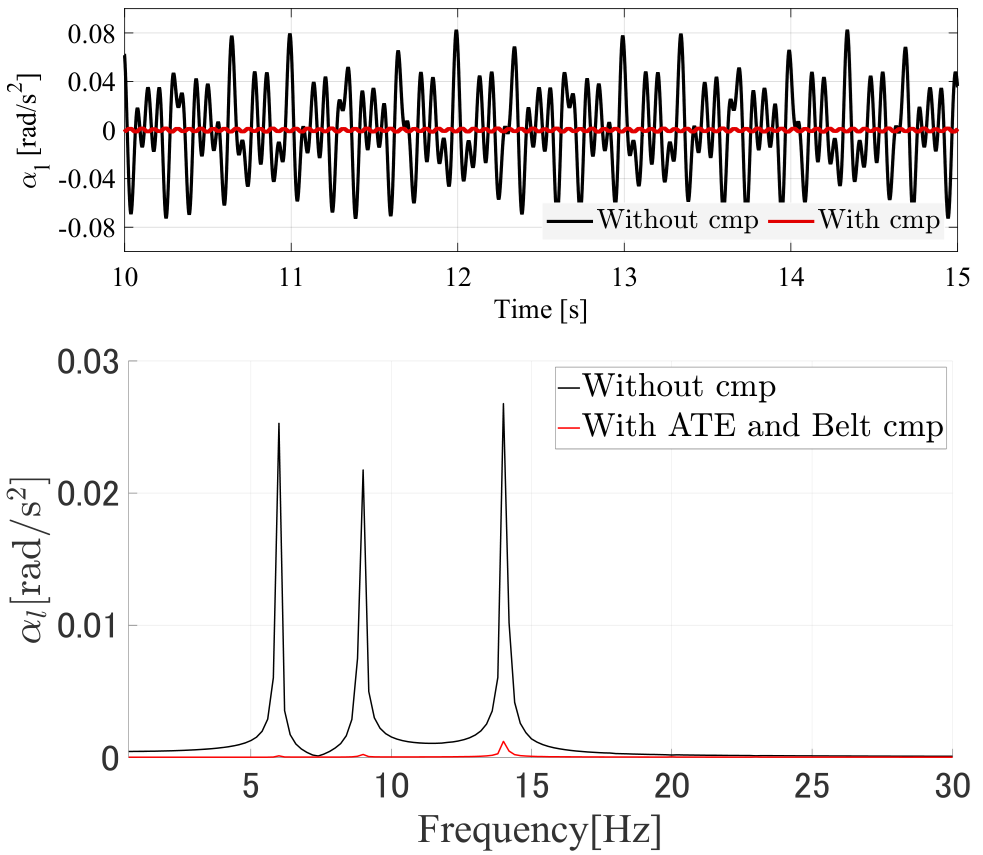
垂直多関節6軸産業用ロボットの高速な位置制御・速度制御・加速度制御・力制御を実現するために、 2慣性共振系および多軸ロボットに特有の基台振動2慣性系・3慣性共振系に対する振動抑制制御系を開発する研究です。
対象ワークをカメラで形状認識して端面の点群データを取得し、 得られた点群データから加速度制御ベースの位置/力ハイブリッド制御系への指令値を生成することで研磨作業の自動化を目指します。 垂直多関節ロボットは2慣性共振系や3慣性共振系、基台振動2慣性系の特性を持つので、 そのための制振機能を持つ加速度制御系である「負荷側加速度制御」を新たに開発しています。 また、研磨完了・未完了を判定するための機械学習も使用します。
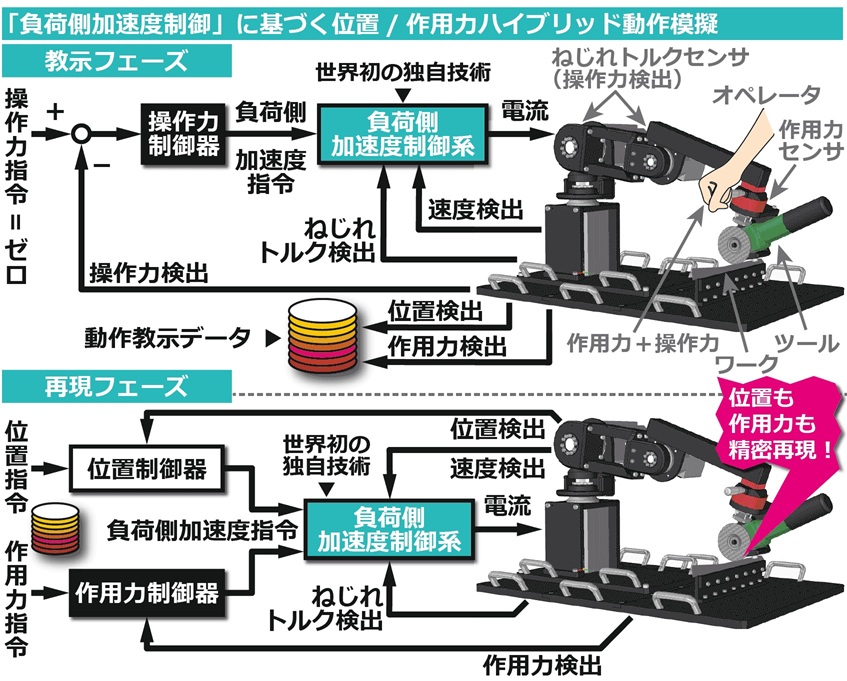
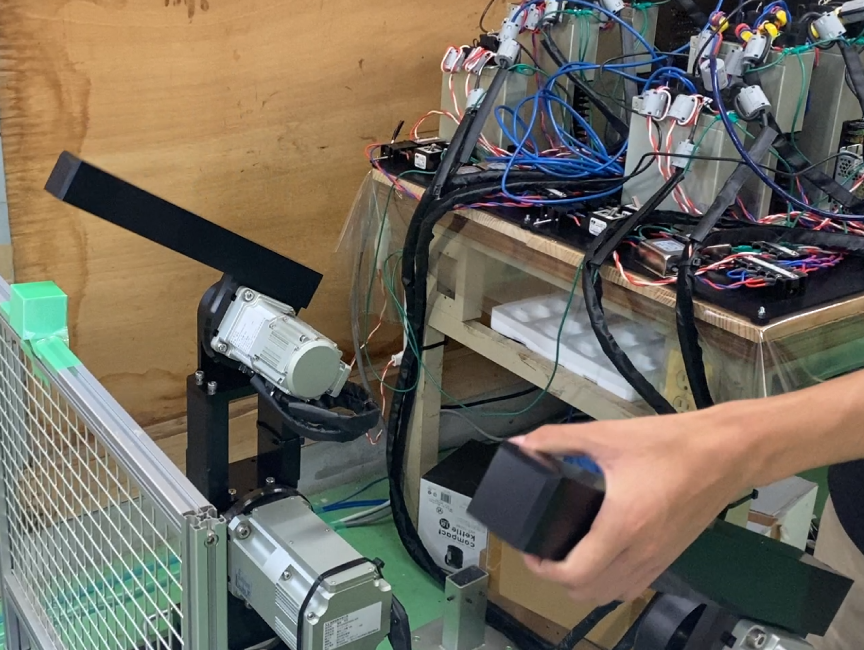
位置と力のハイブリッド制御を用いて人間の接触を伴う動作を模擬するロボットの制御系を開発する研究です。 最初に人間の位置と力をバックドライブ制御によって保存し、その後保存されたデータをもとに負荷側加速度制御によって再現します。 深層学習も併用し、世の中のすべての手作業のロボット化を目指します。
産業用ロボットに用いられる関節の機構にはモータ角度に依存する振動要素が存在し、位置制御する上で課題になっています。 そこで、ロボット先端に取り付けられた加速度センサの情報とモータ側のエンコーダの情報の双方を効果的に活用することで、 その振動を抑えます。
近年になり垂直多関節ロボットにも位置精度が求められるようになり、そのための軌跡精度を向上させる制御アルゴリズムを開発しています。 モータ単体ではトルクが不足するため、ロボットの関節には波動歯車減速機が用いられてトルクが増強されます。 しかしながら、角度伝達誤差と呼ばれる位置精度を妨げるハードウェア的な要因が存在します。 そこで本研究では制御ソフトウェアでその問題をねじ伏せます。
負荷側加速度制御に基づいたバイラテラル制御による遠隔操作ロボットを開発しています。 普通の加速度制御ではロボットが持つ特性である2慣性共振系に対応できず振動してしまい、制御ゲインを下げる必要に迫られ透明性・操作性が下がってしまいますが、 負荷側加速度制御を併用することでこの振動問題を解消します。 多軸ロボットであっても透明性・操作性を犠牲にしない遠隔操作を目指します。
低レイヤ制御系向けのロボット制御フレームワークARCS6を開発しています。 理論的に正確なディジタル制御系の実行にはリアルタイム性が不可欠です。 そこで、特殊なパッチを当てていない通常のLinuxカーネルが動作している汎用コンピュータ上で、 如何にリアルタイム性を確保するかをテーマとした研究を行っています。
Copyright(C), MCLab - The Motion Control Laboratory, Nagaoka University of Technology
長岡技術科学大学モーションコントロール研究室
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}